Robot Design
机器人设计及控制
探索机器人结构创新、动力学建模与先进控制算法,构建更智能、更灵活、更可靠的机器人平台。
我们聚焦机器人与人工智能的深度融合,探索下一代具备自主学习能力的机器人系统,重点关注机器人设计与控制、多模态感知、人机交互、从视频中学习、智能操作与具身智能。
这里展示实验室近期发布在微信公众号和小红书上的内容,方便快速查看研究进展、招募通知和活动更新。
实验室动态已切换为内容管理模式。管理员登录后可以新增微信公众号和小红书文章链接,首页会自动展示最新内容。
RIL-LAB 由聂强教授创立,隶属于香港科技大学(广州)系统枢纽机器人与自主系统学域。我们希望在机器人智能、学习、理解和操作能力之间建立更紧密的联系,打造真正能够在现实世界中持续学习与协作的机器人系统。
我们致力于打造兼具学术深度与系统落地能力的研究平台,强调算法、系统、硬件与应用场景的协同发展。实验室鼓励有独立思考能力、长期主义与动手能力的研究者,在开放讨论和密切指导中推动高质量研究。
我们围绕机器人智能的关键环节展开研究,从感知、决策、控制到学习与操作,形成跨学科、跨层级的研究矩阵,以支持下一代自主机器人系统的发展。
探索机器人结构创新、动力学建模与先进控制算法,构建更智能、更灵活、更可靠的机器人平台。
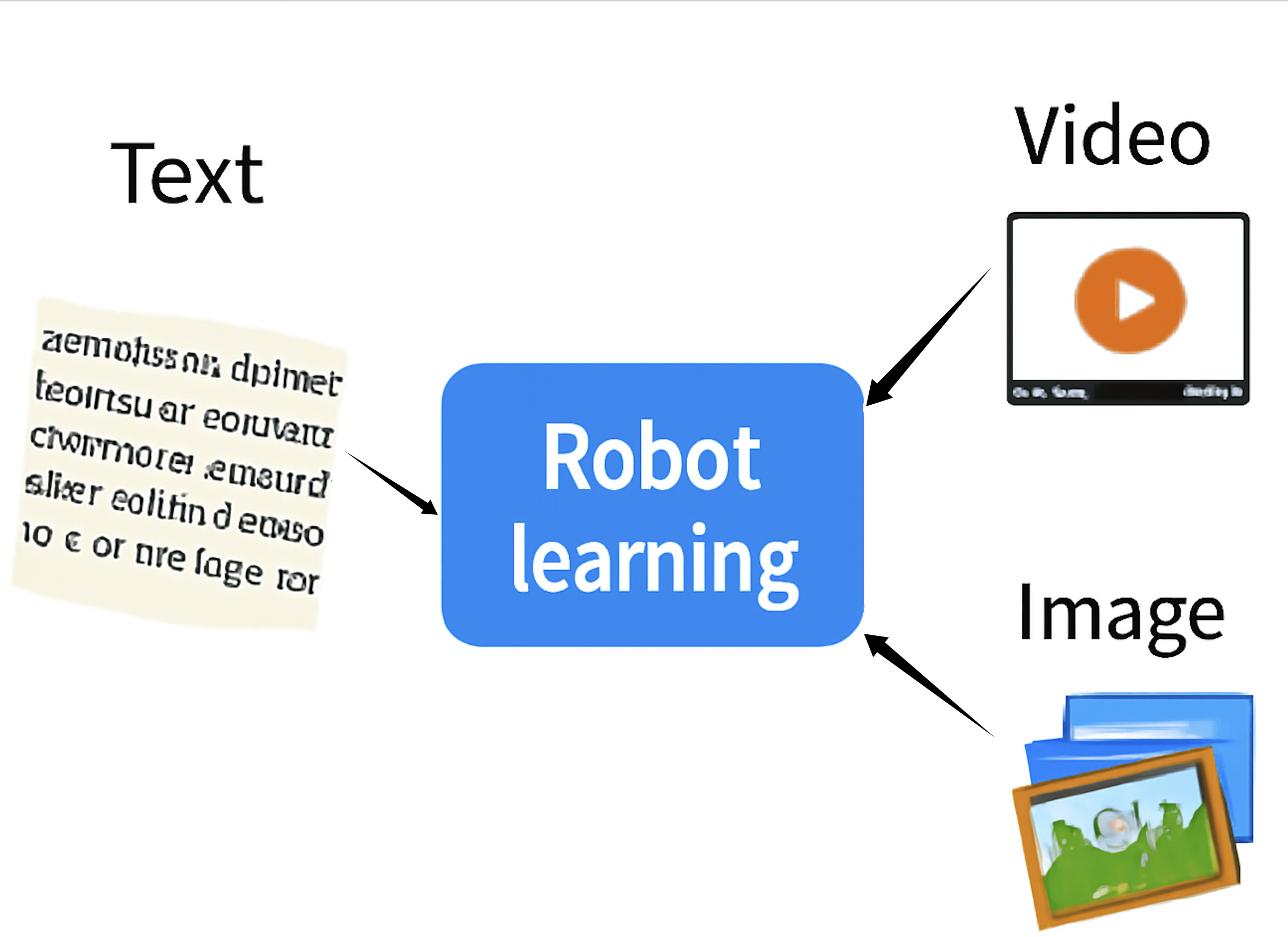
研究视觉、语言与其他传感模态的统一理解与生成,提升机器人对复杂环境的感知与适应能力。

面向复杂真实场景探索智能操作技术,增强机器人感知、决策与执行的一体化能力。

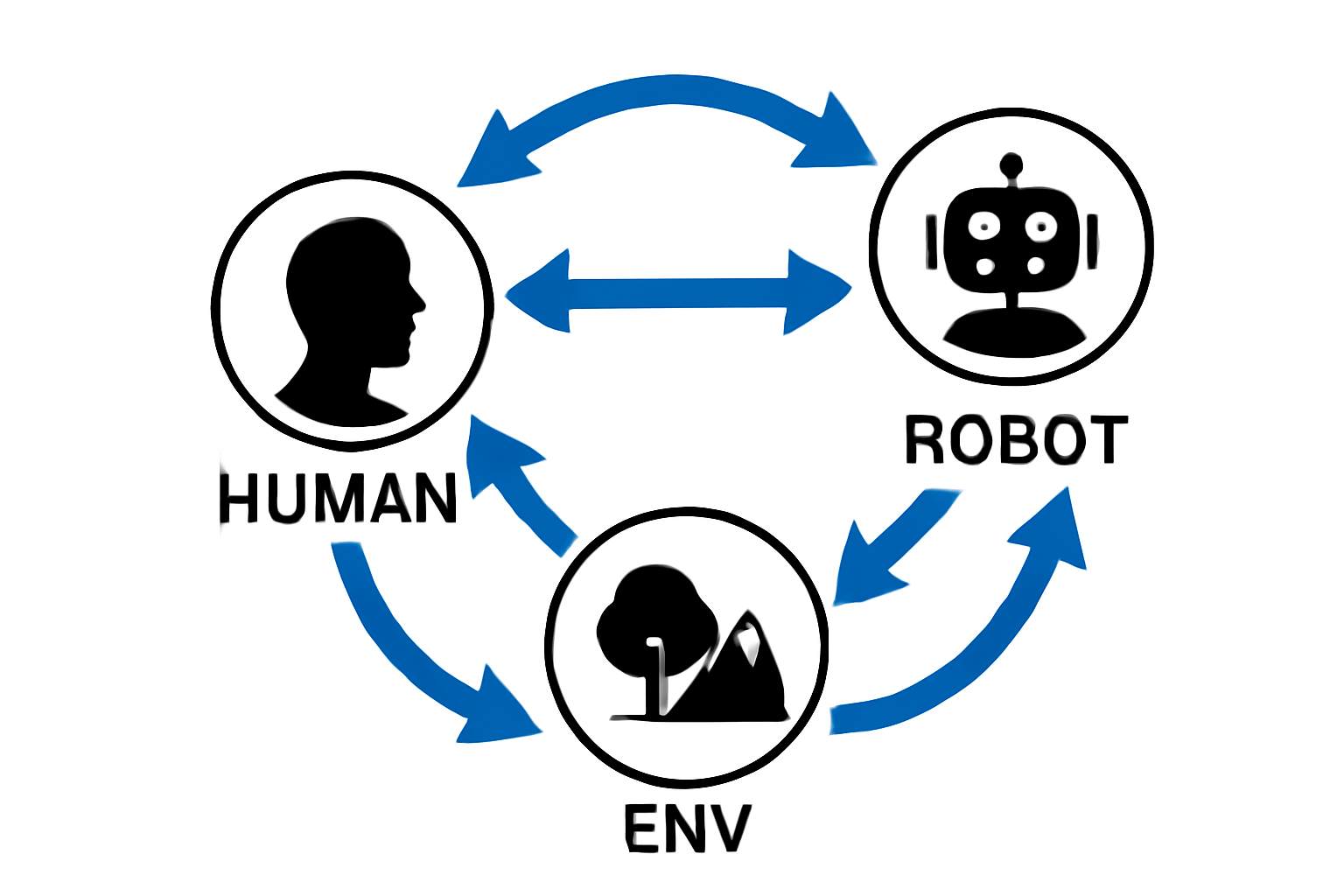
关注人类行为理解、姿态估计、动作预测与协作决策,推动更自然、更高效的人机协同。
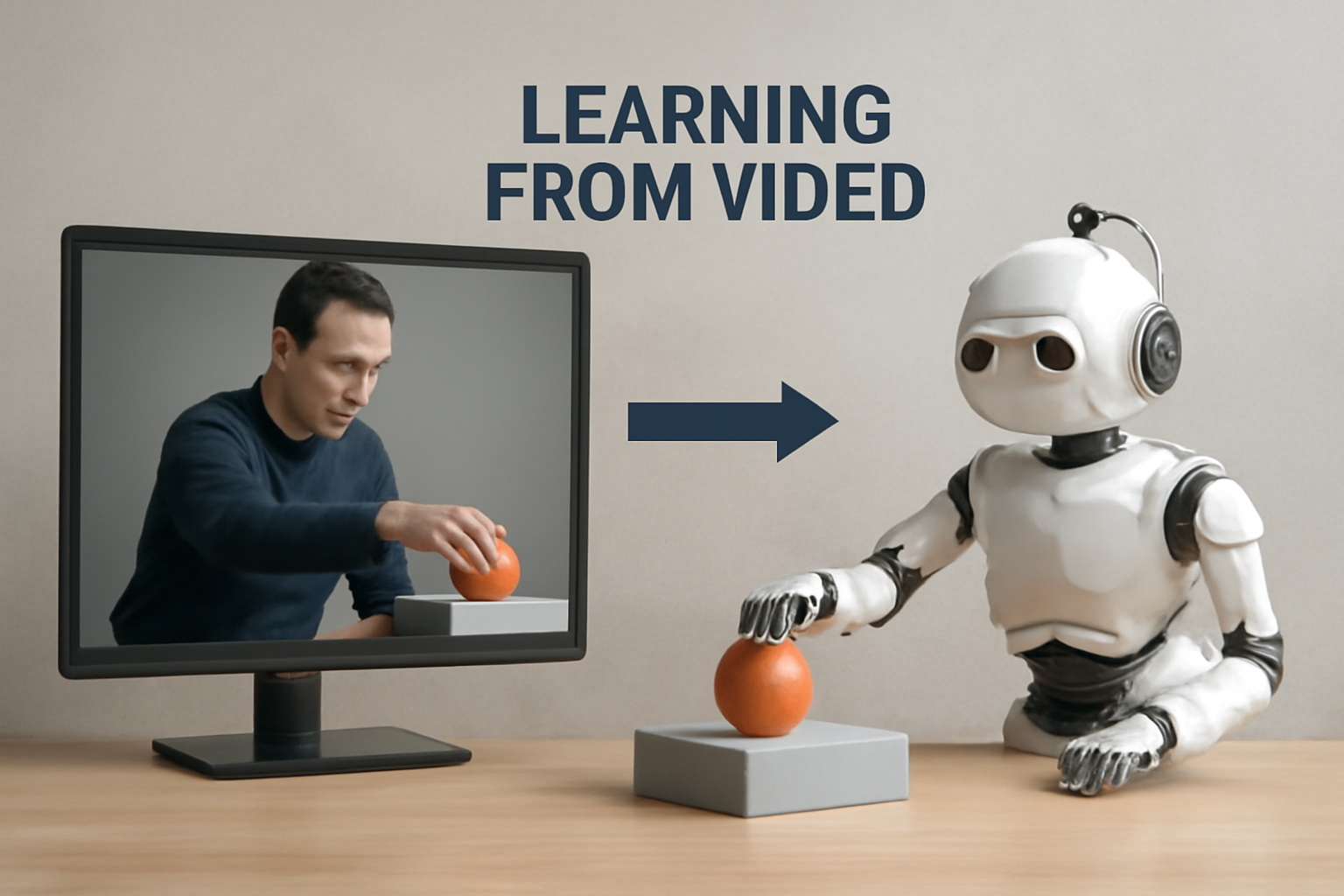
通过视频理解、行为模仿与技能迁移,让机器人从大规模视觉数据中学习通用能力。
开发具备自主决策与持续优化能力的智能体,让机器人在真实环境中实现更高层级的自主行动。
首页展示的是实验室当前选取的研究成果。研究信息改为服务端缓存模式,录入或同步后会稳定保存在服务器中,避免前端临时抓取造成的失败。
首页以后将直接展示数据库里的稳定内容。
管理员登录后前往内容管理页面新增研究成果即可。若使用 arXiv ID,同步成功后标题、作者、摘要等信息会保存在服务器,后续打开首页无需再次抓取。

我们长期欢迎对机器人与人工智能研究有热情的博士生、硕士生、研究助理和实习生加入团队。你可以在这里获得系统性的学术指导、开放合作的研究环境与面向未来的研究问题。

